




Ajokera Gavpêçûnê ya 2 Qonaxî ya Vekirî ya Klasîk R60


Pêşgotina Berhemê



Têkêlî

Taybetmendî
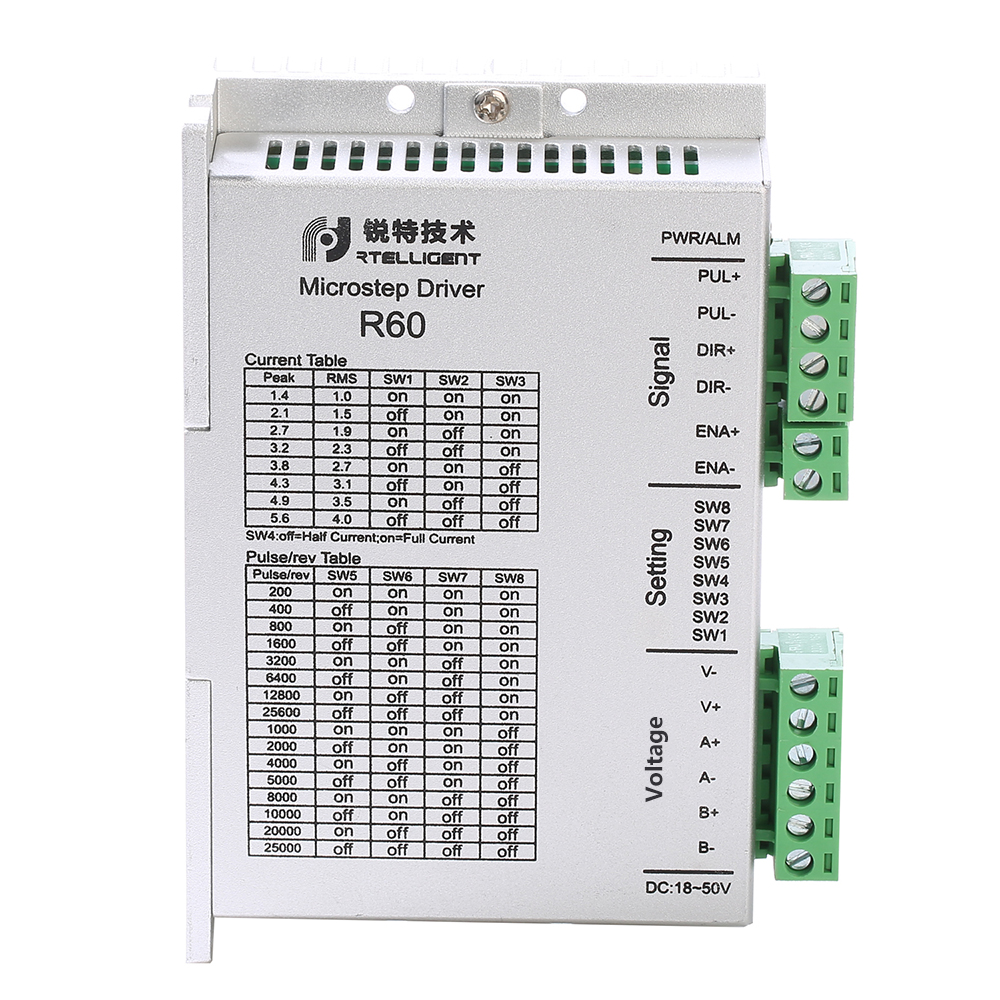
| Navê min | 18 – 50VDC |
| Herika Derketinê | Mîhenga guhêrbarê DIP, 8 vebijark, Heta 5.6 amper (nirxa herî bilind) |
| Kontrola niha | Algorîtmaya kontrola niha ya PID |
| Mîhengên mîkro-gavkirinê | Mîhengên guhêrbarê DIP, 16 vebijark |
| Rêzeya lezê | Motora guncaw bikar bînin, heta 3000rpm |
| Tepeserkirina rezonansê | Xala rezonansê bixweber hesab bike û lerizîna IF asteng bike |
| Guhertina parametreyan | Dema ku ajokar dest pê dike, parametreya motorê bixweber tespît dike, performansa kontrolkirinê baştir dike |
| Moda pulsê | Rêya piştgirî û puls, pulsa ducarî ya CW/CCW |
| Fîlterkirina pulsê | Parzûna sînyala dîjîtal a 2MHz |
| Herika bêkar | Herikîn piştî ku motor dixebite raweste bixweber nîvî dibe |
Mîhengên Niha
| Herikîna Bilind | Herikîna Navînî | SW1 | SW2 | SW3 | Têbînî |
| 1.4A | 1.0A | on | on | on | Niha yên din dikarin werin xweş kirin. |
| 2.1A | 1.5A | ji | on | on | |
| 2.7A | 1.9A | on | ji | on | |
| 3.2A | 2.3A | ji | ji | on | |
| 3.8A | 2.7A | on | on | ji | |
| 4.3A | 3.1A | ji | on | ji | |
| 4.9A | 3.5A | on | ji | ji | |
| 5.6A | 4.0A | ji | ji | ji |
Mîhenga gavên mîkro
| Gav/şoreş | SW5 | SW6 | SW7 | SW8 | Têbînî |
| 200 | on | on | on | on | Dabeşên din dikarin werin xweş kirin. |
| 400 | ji | on | on | on | |
| 800 | on | ji | on | on | |
| 1600 | ji | ji | on | on | |
| 3200 | on | on | ji | on | |
| 6400 | ji | on | ji | on | |
| 12800 | on | ji | ji | on | |
| 25600 | ji | ji | ji | on | |
| 1000 | on | on | on | ji | |
| 2000 | ji | on | on | ji | |
| 4000 | on | ji | on | ji | |
| 5000 | ji | ji | on | ji | |
| 8000 | on | on | ji | ji | |
| 10000 | ji | on | ji | ji | |
| 20000 | on | ji | ji | Ji | |
| 25000 | ji | ji | ji | ji |
Danasîna Berhemê
Malbata me ya klasîk a ajokarên gavavêtinê yên du-qonaxî yên bi çerxa vekirî pêşkêş dikin ku ji bo pêşkêşkirina performans û rastbûnek bilind ji bo cûrbecûr sepanên pîşesaziyê hatine çêkirin. Ev malbata pêşkeftî ya ajokarên gavavêtinê taybetmendiyên pêşkeftî dihewîne, ku wan ji bo her pergala otomasyonê dike bijarteyek pêbawer û piralî.
Yek ji taybetmendiyên sereke yên rêzeya ajokarên me yên klasîk ên du-qonaxî yên gavavêtinê yên vekirî çareseriya wê ya bilind e. Çareseriya mîkrogavê ya herî zêde ya ajokerê 25,600 gav di her zivirînê de ye, ku kontrola tevgerê ya nerm û rast misoger dike. Ev çareserî pozîsyonkirina rast gengaz dike û lerizînê kêm dike, di dawiyê de karîgerî û performansa giştî ya makîneyê baştir dike.
Taybetmendiyeke din a cuda ya rêzeya ajokera me ya klasîk a du-qonaxî ya gavavêtinê ya vekirî-xelek derana wê ya hêja ye. Bi torka ragirtinê ya herî zêde heta 5.2 Nm, ajoker ji bo sepanên dijwar hêzek bihêz û pêbawer peyda dike. Çi hûn hewce ne ku barên giran birêve bibin an jî leza bilind bi dest bixin, ev ajoker torka bilindtir peyda dike da ku hewcedariyên we bicîh bîne.
Agahiyên Berhemê
Herwiha, rêzeya me ya klasîk a ajokarên gavavêtinê yên du-qonaxî yên vekirî-çerx ji bo xebitandina hêsan û entegrekirina bêkêmasî di pergala weya otomasyonê de hatine sêwirandin. Bi navrûya xwe ya bikarhêner-dostane û vebijarkên têlkirinê yên hêsan, ev ajokar dema sazkirinê kêm dike û tevliheviya sazkirina pergalê kêm dike. Sêwirana wê ya kompakt di heman demê de sazkirina nerm jî dihêle, ku dihêle hûn wê di hawîrdorên bi cîhê sînorkirî de entegre bikin.
Herwiha, rêzeya me ya klasîk a ajokarên gavavêtinê yên du-qonaxî yên çerxa vekirî pergalek parastinê ya pêşkeftî pêşkêş dikin da ku alavên we biparêzin. Taybetmendiyên wê yên wekî parastina ji voltaja zêde, parastina ji herikîna zêde û parastina ji kurteçûna motorê hene da ku temenê motora gavavêtinê misoger bike û xetera zirara ji ber xeletiyên elektrîkê kêm bike.
Bi kurtasî, rêzeya me ya ajokarên gavavêtinê yên du-qonaxî yên klasîk ên çerxa vekirî çareseriyên pêbawer û performansa bilind in ji bo sepanên kontrola tevgerê yên rast. Bi çareseriya xwe ya bilind, derana torkê ya hêja, navrûya bikarhêner-dostane û pergala parastinê ya pêşkeftî, ev ajokar ji bo sektorên cûrbecûr ên pîşesaziyê îdeal e. Ji bo baştirkirina karîgerî û rastbûna pergalên otomasyona xwe, baweriya xwe bi rêzeya me ya ajokarên gavavêtinê yên du-qonaxî yên klasîk ên çerxa vekirî bînin.
-
 Rêbernameya Bikarhêner a Rtelligent R60 Biguherîne
Rêbernameya Bikarhêner a Rtelligent R60 Biguherîne


