




Ajokera Gavavêtinê ya 2 Eksenî ya Jîr R60X2


Pêşgotina Berhemê



Têkêlî

Taybetmendî
| Navê min | 24 - 48 VDC |
| Herika derketinê | Heta 5.6 amper (lûtkeya bilind) |
| Kontrola niha | Algorîtmaya kontrola niha ya PID |
| Mîhengên beşê | Mîhenga guhêrbarê DIP, 8 vebijark |
| Rêzeya lezê | Motora gavê ya guncaw bikar bînin, heta 3000rpm |
| Tepeserkirina rezonansê | Xala rezonansê bixweber hesab bike û lerizîna IF asteng bike |
| Guhertina parametreyan | Dema ku ajokar dest pê dike, parametreya motorê bixweber tespît dike, performansa kontrolkirinê baştir dike |
| Moda pulsê | Piştgiriya pulsê + rêwerz, pulsa ducar |
| Fîlterkirina pulsê | Parzûna sînyala dîjîtal a 2MHz |
| Herika bêkar | Piştî rawestandina motorê bixweber nîvî herikê kêm bike |
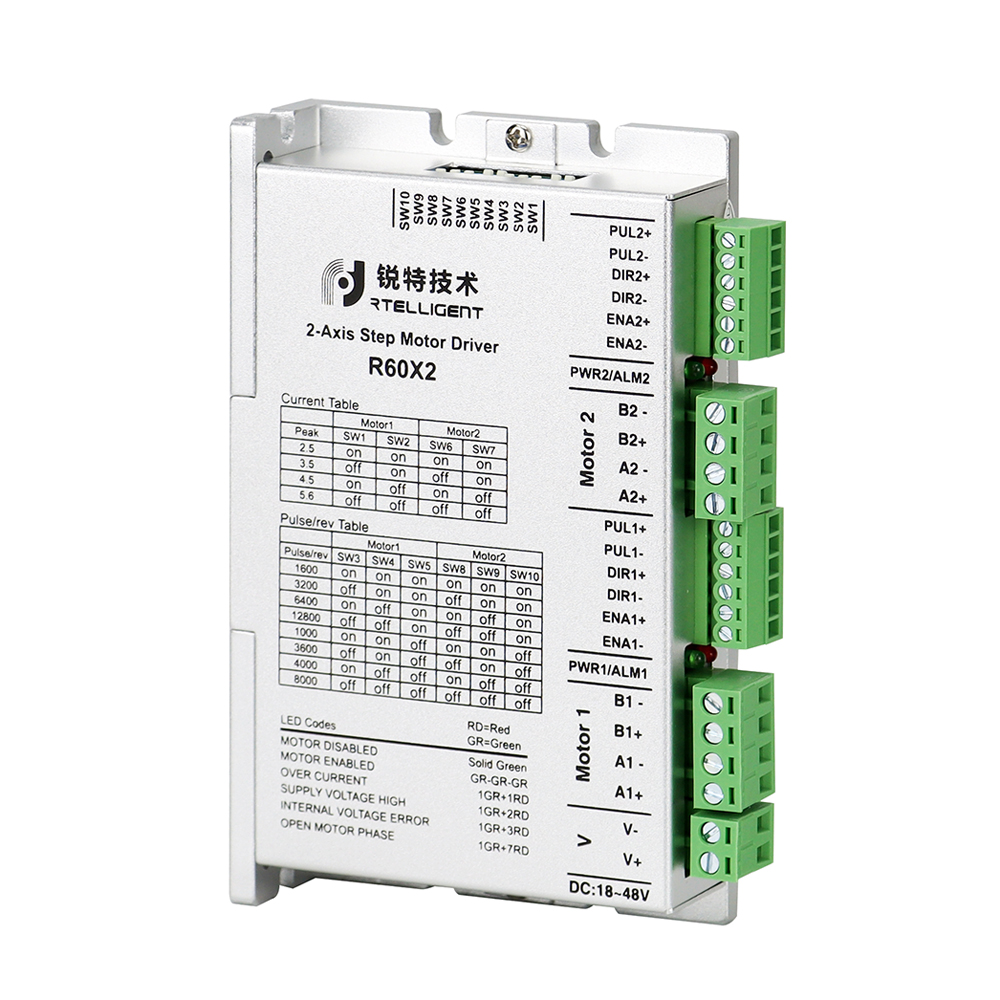
Mîhengên Niha
| AXIS-1 | AXIS-2 |
| |||
| Herikîna herî bilind | SW1 | SW2 | SW6 | SW7 | Bingotin |
| 2.5A | on | on | on | on | Nirxên din ên heyî dikarin werin xweş kirin |
| 3.5A | ji | on | ji | on | |
| 4.5A | on | ji | on | ji | |
| 5.6A | ji | ji | ji | ji | |
Mîhenga gavên mîkro
| AXIS-1 | AXIS-2 |
| ||||||
| Gav/şoreş | SW3 | SW4 | SW5 | SW8 | SW9 | SW10 | Bingotin | |
| 1600 | on | on | on | on | on | on | Nirxên din ên heyî dikarin werin xweş kirin | |
| 3200 | ji | on | on | ji | on | on | ||
| 6400 | on | ji | on | on | ji | on | ||
| 12800 | ji | ji | on | ji | ji | on | ||
| 1000 | on | on | ji | on | on | ji | ||
| 3600 | ji | on | ji | ji | on | ji | ||
| 4000 | on | ji | ji | on | ji | ji | ||
| 8000 | ji | ji | ji | ji | ji | ji | ||
-
 Rêbernameya Bikarhêner a Rtelligent R60X2
Rêbernameya Bikarhêner a Rtelligent R60X2
-

Ajokera Gavpêçûnê ya Dîjîtal a Kontrola Pulsê ya Pêşketî R86
-

Ajokera Gavavêtinê ya 3 Qonaxî ya Loopa Vekirî 3R60
-
Rêzeya Motorên Gavavêtinê yên 5-qonaxî yên Loopa Vekirî
-

Ajokara Berhema Stepperê Dîjîtal R110PLUS
-

Ajokera Gavpê ya 2 Qonaxî ya Loopa Vekirî R60S Series
-

Ajokera Gavpêçayî ya Yek-Ajokar-Du-Ajokar R42-D