Kontrola Pulsê 2 Qonaxî ya Çerxa Girtî Ajokera Gavpêçandinê T42


Pêşgotina Berhemê



Têkêlî

Taybetmendî
| Navê min | 18–68 VDC |
| Rastbûna kontrolê | 4000 Puls/r |
| Moda pulsê | Rê û puls, pulsa duqat a CW/CCW |
| Kontrola niha | Algorîtmaya kontrola servo vektor |
| Mîhengên mîkro-gavkirinê | Mîhengên guhêrbarê DIP, 15 vebijark (an jî mîhengên nermalava debuggingê) |
| Rêzeya lezê | Konvansiyonel 1200 ~ 1500rpm, heta 4000rpm |
| Tepeserkirina rezonansê | Xala rezonansê bixweber hesab bike û lerizîna IF asteng bike |
| Guherandina parametreya PID | Nermalava ceribandinê ji bo sererastkirina taybetmendiyên PID-a motorê |
| Fîlterkirina pulsê | Parzûna sînyala dîjîtal a 2MHz |
| Derana alarmê | Derana alarmê ya zêdeherikîn, zêdevoltaja, xeletiya pozîsyonê, hwd. |
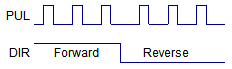
Moda Pulsê
Navrûya sînyala ajokarê rêzeya T ya standard bi şiklê pulsê ye, û T60 dikare du celeb sînyalên fermana pulsê werbigire.
| Puls û rê (PUL + DIR) |
|
| Pulsa ducarî (CW +CCW) | 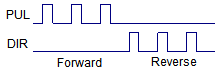 |
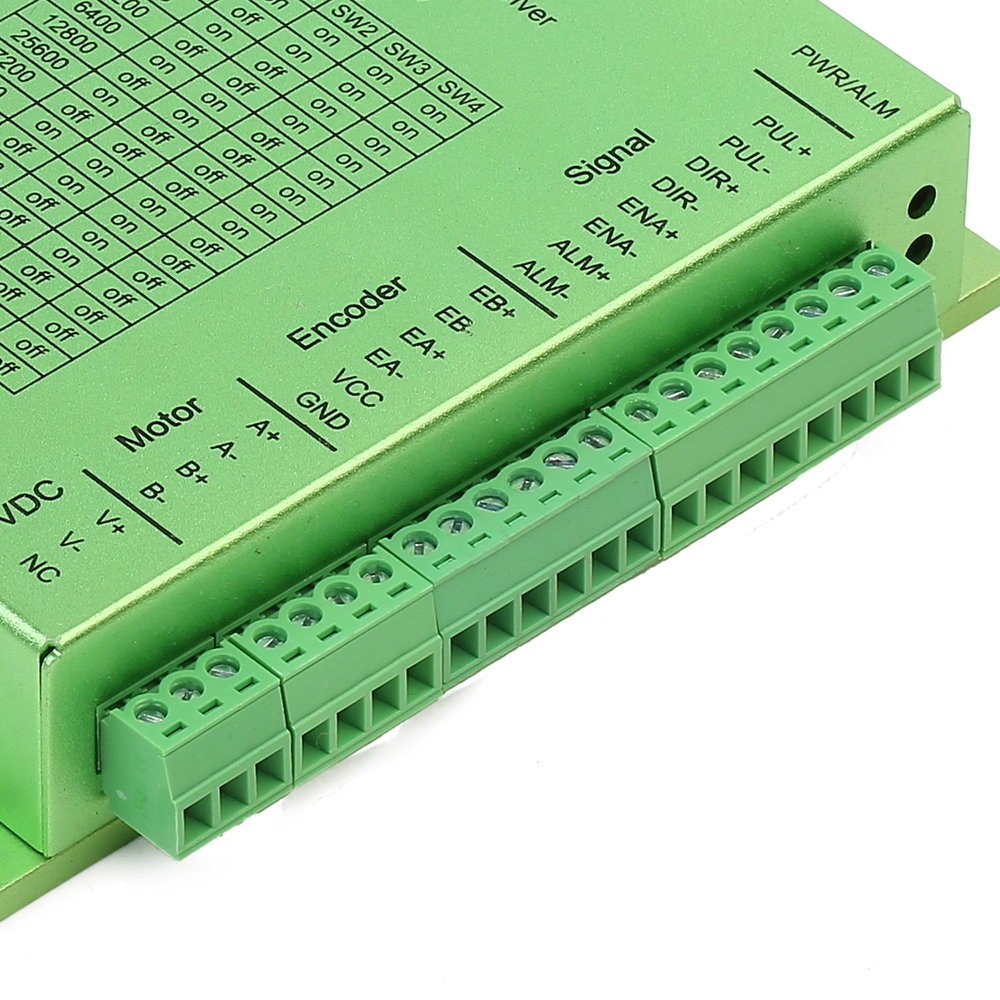
Mîhenga gavên mîkro
| Puls/rev | SW1 | SW2 | SW3 | SW4 | Têbînî |
| 3600 | on | on | on | on | Guhêra DIPê vedigere rewşa "3600" û nermalava ceribandinê dikare bi azadî beşên din biguherîne. |
| 800 | ji | on | on | on | |
| 1600 | on | ji | on | on | |
| 3200 | ji | ji | on | on | |
| 6400 | on | on | ji | on | |
| 12800 | ji | on | ji | on | |
| 25600 | on | ji | ji | on | |
| 7200 | ji | ji | ji | on | |
| 1000 | on | on | on | ji | |
| 2000 | ji | on | on | ji | |
| 4000 | on | ji | on | ji | |
| 5000 | ji | ji | on | ji | |
| 8000 | on | on | ji | ji | |
| 10000 | ji | on | ji | ji | |
| 20000 | on | ji | ji | ji | |
| 40000 | ji | ji | ji | ji |
-
 Rêbernameya Bikarhêner a Rtelligent T42
Rêbernameya Bikarhêner a Rtelligent T42