



Ajokera Gavavêtinê ya 2 Qonaxî ya Çerxa Girtî T60Plus


Pêşgotina Berhemê



Têkêlî

Taybetmendî
| Navê min | 18~48VDC |
| Rastbûna kontrolê | 4000 Puls/r |
| Moda pulsê | Rêwerz û puls, pulsa ducarî ya CW/CCW, pulsa çargoşeyî ya A/B |
| Kontrola niha | Algorîtmaya kontrola servo vektor |
| Mîhenga dabeşkirinê | Mîhenga guhêrbarê DIP, 15 vebijark (an jî mîhenga nermalava debugging) |
| Rêzeya lezê | Konvansiyonel 1200~1500rpm, heta 4000rpm |
| Tepeserkirina rezonansê | Hesabkirina otomatîkî ya xala rezonansê ji bo tepeserkirina lerizîna navîn-frekansê |
| Guherandina parametreya PID | Nermalava debuggingê ji bo sererastkirina taybetmendiyên PID-a motorê |
| Fîltera pulsê | Parzûna sînyala dîjîtal a 2MHz |
| Derana alarmê | Derana alarmê ji bo herikîna zêde, voltaja zêde, xeletiya pozîsyonê, û hwd. |
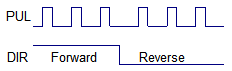
Moda Pulsê
Navrûya sînyalê ya ajokera standard a rêzeya T şiklê pulsê ye, û T60PLUS V3.0 dikare sê celeb sînyalên fermana pulsê werbigire.
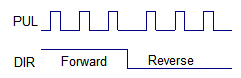
| Puls û rê (PUL + DIR) |
|
| Pulsa ducarî (CW +CCW) |
|
| Pulsa ortogonal (pulsa ortogonal A/ B) | 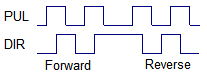 |
Mîhenga gavên mîkro
| Puls/rev | SW1 | SW2 | SW3 | SW4 | Têbînî |
| 3600 | on | on | on | on | Guhêra DIPê vedigere rewşa "3600" û nermalava ceribandinê dikare bi azadî beşên din biguherîne. |
| 800 | ji | on | on | on | |
| 1600 | on | ji | on | on | |
| 3200 | ji | ji | on | on | |
| 6400 | on | on | ji | on | |
| 12800 | ji | on | ji | on | |
| 25600 | on | ji | ji | on | |
| 7200 | ji | ji | ji | on | |
| 1000 | on | on | on | ji | |
| 2000 | ji | on | on | ji | |
| 4000 | on | ji | on | ji | |
| 5000 | ji | ji | on | ji | |
| 8000 | on | on | ji | ji | |
| 10000 | ji | on | ji | ji | |
| 20000 | on | ji | ji | ji | |
| 40000 | ji | ji | ji | ji |
Mîhenga gavên mîkro
Termînalên ajokerê şewitîn?
1. Ger di navbera termînalan de kurteçûnek hebe, kontrol bike ka pêçên motorê kurtçûn kiriye an na.
٢. Heke berxwedana navxweyî ya di navbera termînalan de pir mezin be, ji kerema xwe kontrol bikin.
3. Ger zêde lehimkirin li girêdana di navbera têlan de were zêdekirin da ku gogeke lehimkirinê çêbibe.
Ajokera gavavêtinê ya çerxa girtî alarm heye?
1. Heke ji bo têlên kodkerê xeletiyek girêdanê hebe, ji kerema xwe kabloya dirêjkirina kodkerê ya rast bikar bînin, an jî heke hûn ji ber sedemên din nekarin kabloya dirêjkirinê bikar bînin, bi Rtelligent re têkilî daynin.
2. Kontrol bike ka kodker zirar dîtiye wekî derana sînyalê.
-
 Rêbernameya Bikarhêner a Rtelligent T60PLUS V3.0
Rêbernameya Bikarhêner a Rtelligent T60PLUS V3.0




