



Ajokera Gavavêtinê ya 2 Qonaxî ya Çerxa Girtî T86 ya Kontrola Pulsê


Pêşgotina Berhemê



Têkêlî

Taybetmendî
| Navê min | 18-80VAC / 18–110VDC |
| Rastbûna kontrolê | 4000 Puls/r |
| Moda pulsê | Rê û puls, pulsa duqat a CW/CCW |
| Kontrola niha | Algorîtmaya kontrola servo vektor |
| Mîhengên mîkro-gavkirinê | Mîhengkirina guhêrbarê DIP, an mîhengkirina nermalava debuggingê |
| Rêzeya lezê | Konvansiyonel 1200 ~ 1500rpm, heta 4000rpm |
| Tepeserkirina rezonansê | Xala rezonansê bixweber hesab bike û lerizîna IF asteng bike |
| Guherandina parametreya PID | Nermalava ceribandinê ji bo sererastkirina taybetmendiyên PID-a motorê |
| Fîlterkirina pulsê | Parzûna sînyala dîjîtal a 2MHz |
| Derana alarmê | Derana alarmê ya zêdeherikîn, zêdevoltaja, xeletiya pozîsyonê, hwd. |
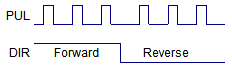
Moda Pulsê
Navrûya sînyala ajokarê rêzeya T ya standard bi şiklê pulsê ye, û T86 dikare du celeb sînyalên fermana pulsê werbigire.
| Puls û rê (PUL + DIR) |
|
| Pulsa ducarî (CW +CCW) | 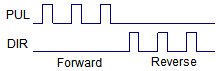 |
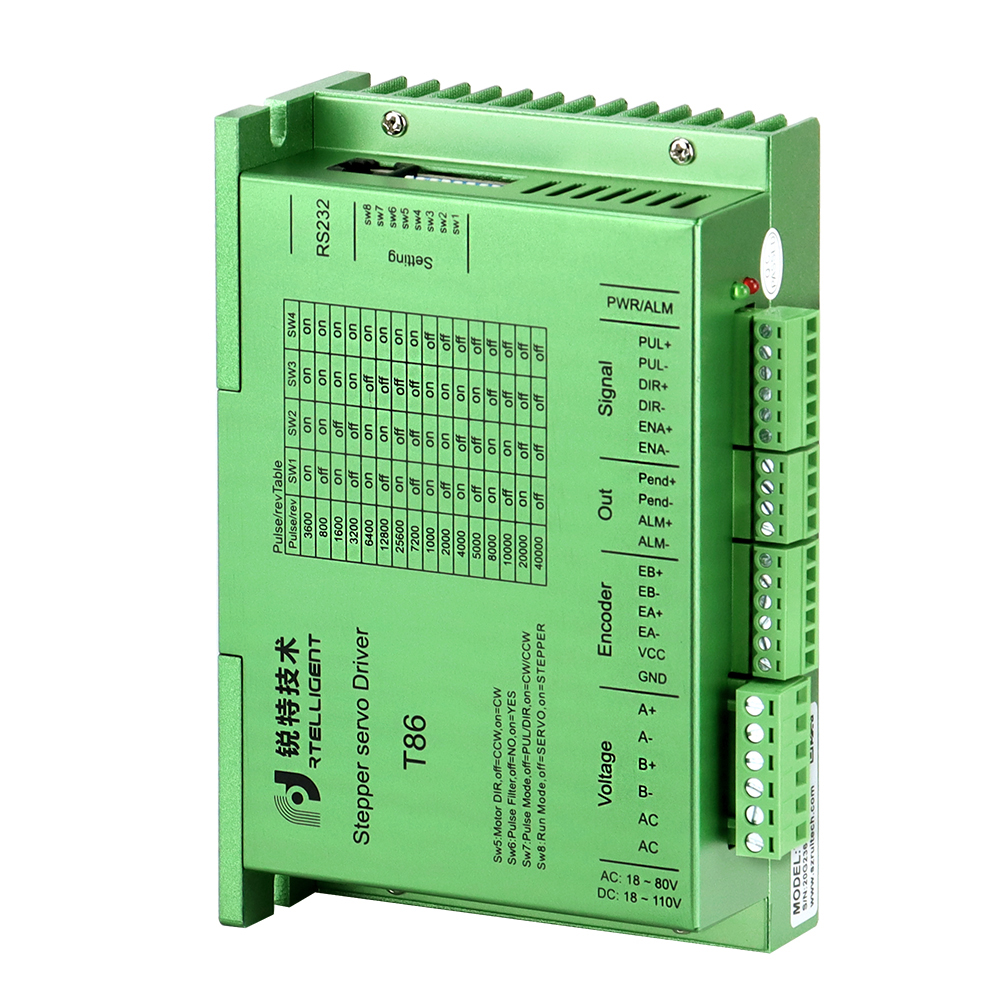
Mîhenga gavên mîkro
| Puls/rev | SW1 | SW2 | SW3 | SW4 | Têbînî |
| 3600 | on | on | on | on | Guhêra DIPê vedigere rewşa "3600" û nermalava ceribandinê dikare bi azadî beşên din biguherîne. |
| 800 | ji | on | on | on | |
| 1600 | on | ji | on | on | |
| 3200 | ji | ji | on | on | |
| 6400 | on | on | ji | on | |
| 12800 | ji | on | ji | on | |
| 25600 | on | ji | ji | on | |
| 7200 | ji | ji | ji | on | |
| 1000 | on | on | on | ji | |
| 2000 | ji | on | on | ji | |
| 4000 | on | ji | on | ji | |
| 5000 | ji | ji | on | ji | |
| 8000 | on | on | ji | ji | |
| 10000 | ji | on | ji | ji | |
| 20000 | on | ji | ji | ji | |
| 40000 | ji | ji | ji | ji |
Danasîna Berhemê
Pêşkêşkirina ajokera gavavêtinê ya du-qonaxî ya çerxa girtî ya herî pêşkeftî ya bi kontrolkirina pulsê, hilberek şoreşger e ku teknolojiya pêşkeftî bi performans û pêbaweriya bêhempa re dike yek. Ev ajokera gavavêtinê ya şoreşger hatiye sêwirandin da ku şoreşek di awayê kontrolkirina motorên rastîn de çêbike, û ji bo cûrbecûr serîlêdanan karîgerî û rastbûna çêtirîn misoger bike.
Yek ji taybetmendiyên sereke yên vê ajokera gavavêtinê ya hêja pergala wê ya çerxa girtî ye, ku kontrola rast peyda dike û windahiyên gavavêtinê ji holê radike, hetta di bin şert û mercên xebitandinê yên dijwar de jî. Bi mekanîzmaya xwe ya kontrola pulsê ya pêşkeftî, ajoker pozîsyona rast, xebata nerm û lerzîna kêmkirî garantî dike, performans û aramiya hêja peyda dike.
Ajokera gavavêtinê ya du-qonaxî ya bi kontrolkirina pulsê-xeleka girtî jî xwedî sêwirana zexm û kompakt e û teknolojiya mîkroprosesorê ya herî dawî vedihewîne. Ev dihêle ku ew derana torkê ya bilindtir bi dest bixe û barên girantir hilgire, ku ew ji bo otomasyona pîşesaziyê, robotîkê, makîneyên CNC û sepanên din ên rastbûna bilind îdeal dike. Algorîtmaya kontrola motorê ya çareseriya bilind kontrola tevgera rast peyda dike, ku ew ji bo karên ku tevgera tevlihev hewce dikin vebijarkek hêja dike.
Her wiha ajokar bi xwerêvebirina jîr ve hatiye sazkirin ku bixweber her çewtî an jî xeletiyan tespît dike û rast dike. Ev yek performansa domdar misoger dike û hewcedariya bi sererastkirinên destî an jî kalibrkirinê kêm dike, û dem û hewldana bikarhêneran teserûf dike.
Herwiha, ajokarên gavavêtinê yên du-qonaxî yên bi kontrolkirina pulsê piralî ne û bi cûrbecûr celebên motoran re, di nav de motorên gavavêtinê yên duqutbî û yekqutbî, hevaheng in. Navrûya girêdana wê ya hêsan û panela kontrolê ya bikarhêner-dostane entegrekirin û xebitandina bêkêmasî bi pergalên heyî re hêsan dike, dema sazkirinê û tevliheviyê kêm dike.
Bi kurtasî, Ajokera Gavavê ya Du-Qonaxî ya Bi Lêdana Girêdayî ya Kontrolkirina Pulsê berhemeke guherîner a lîstikê ye ku nûjenî, rastbûn û pêbaweriyê di yek amûrekî bihêz de bi hev re dike yek. Taybetmendiyên wê yên bêhempa yên wekî kontrola çerxa girtî, mekanîzmayên kontrola pulsê yên pêşkeftî, şiyanên xwerêkûpêkkirinê û piralîbûn wê ji bo sepanên ku hewceyê rastbûn û karîgeriya herî bilind in îdeal dike. Pêşeroja kontrola motora gavê biceribînin û bi vê berhema bêhempa astên nû yên performans û hilberînê vekin.
-
 Rêbernameya Bikarhêner a Rtelligent T86 Biguherîne
Rêbernameya Bikarhêner a Rtelligent T86 Biguherîne